Robotic Arm Applications
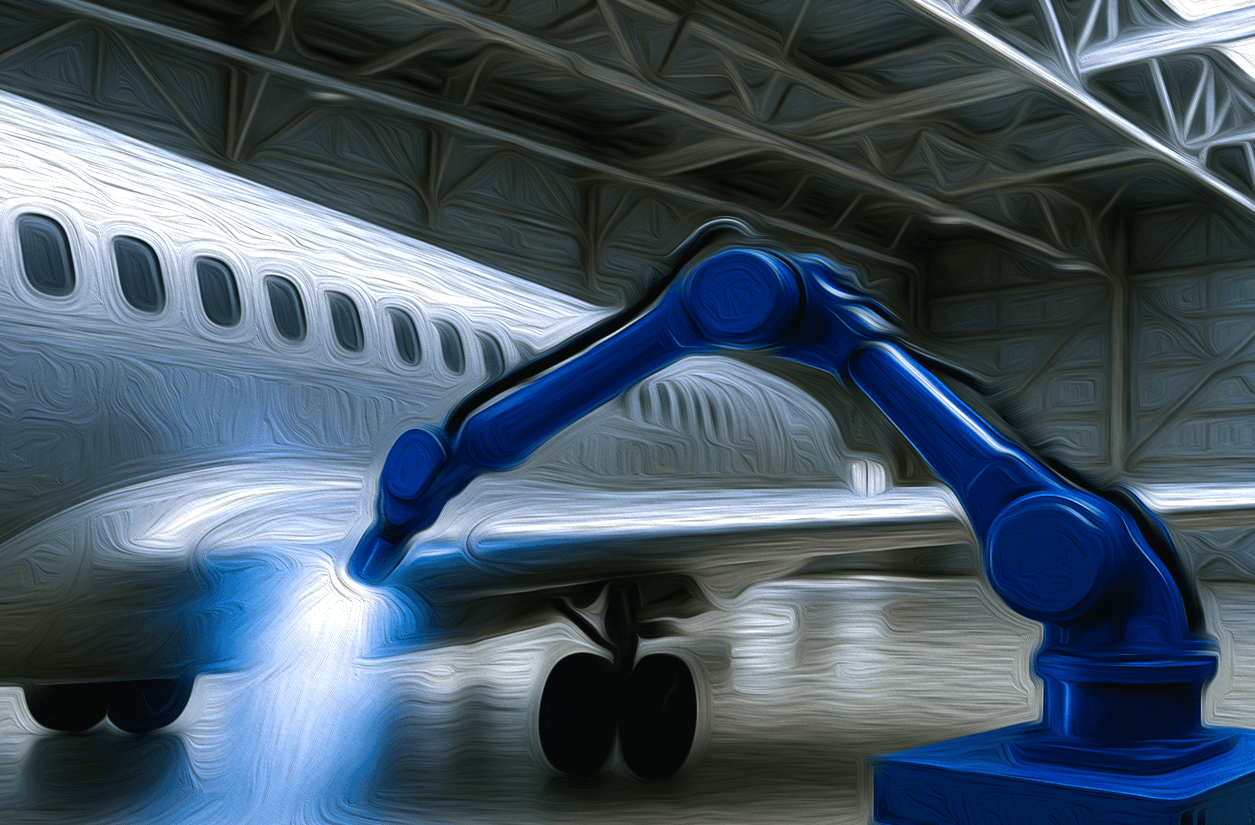
This project highlights the diverse applications of robotic arms, including working on airplanes in hangars, mobile platforms, and human-operated interfaces.
Versatile Robotic Arm Platforms
SPARCL deploys industrial and collaborative robotic arms configured for aircraft maintenance tasks. From mobile-base configurations that traverse hangar floors to ceiling-mounted gantry systems, our platforms adapt to any facility layout.
Platform Configurations
- Mobile base with omnidirectional wheels for hangar floor traversal
- Gantry-mounted systems for large aircraft coverage
- Fixed-base cells for component-level work (landing gear, engine parts)
- Human-operated interfaces with force feedback for delicate procedures
End Effectors
Each robotic arm can be fitted with interchangeable end effectors: laser cleaning heads, paint application nozzles, inspection cameras, surface preparation tools, and precision measurement probes. Tool changes take under 30 seconds with automatic calibration.
Reach and Payload
Our standard platforms offer 6-axis articulation with reach from 850mm to 3,100mm depending on configuration. Payload capacity ranges from 5kg (collaborative) to 150kg (industrial), supporting everything from lightweight sensors to heavy laser cleaning heads.
Related Technologies

Robotic Inspection and Maintenance
This project focuses on the inspection and maintenance of aircraft using robotic systems, including robots inspecting aircraft in hangars.
Explore Technology →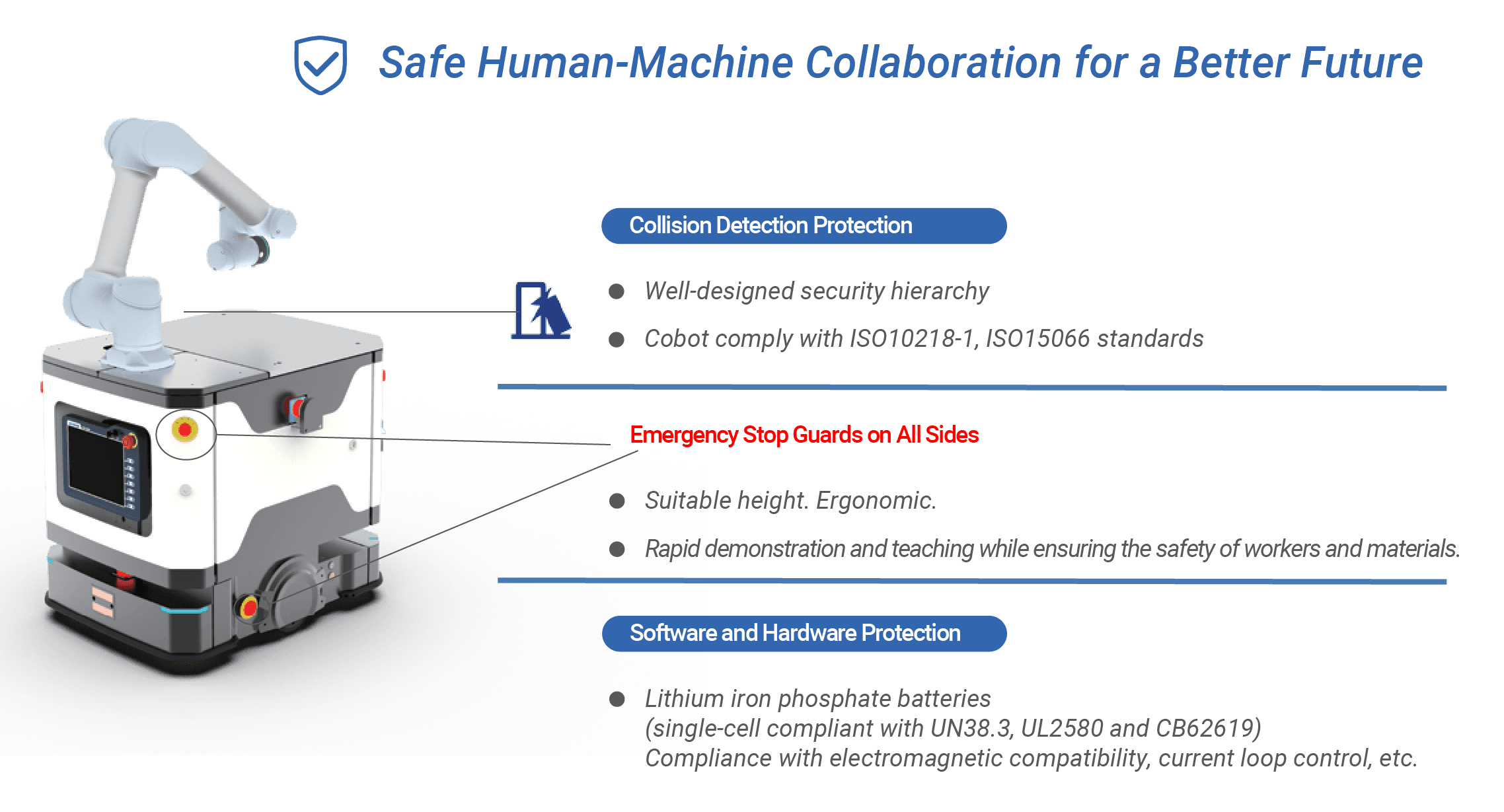
Robotics Safety and Collaboration
This project showcases various robotic systems designed for safety and collaboration with humans. It includes images of robots with safety features, touchscreen control panels, and safety zones with adjustable protection ranges.
Explore Technology →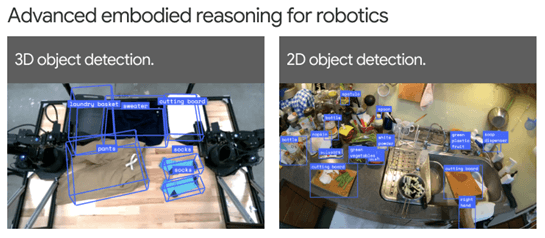
Robotics Vision and Detection
This project focuses on the use of vision and detection technologies in robotics, including 3D and 2D object detection, autonomous robots with vision, and multimodal prompts for robotics tasks.
Explore Technology →